13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号
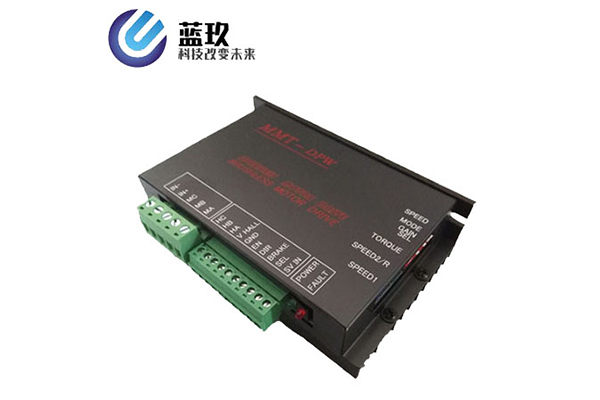
AGV机器人低压直流伺服电机的使用是非常广泛的,在市场竞争非常激烈的环境下面能脱颖而出,那就说明设备具有独特的优势。1、响应仅由数字输入脉冲确定,所以在运转时可以采用开环控制,这样一来就使得电机的结构可以比较简单而且控制成本。2、在运转的时候,电机旋转的角度正比于脉冲数,而且当有绕组激磁时,电机停转的时候具有最大的转矩。3、每步的精度在百分之三到百分之五,而且不会将一步的误差积累到下一步因而有较好的位置精度和运动的重复性。
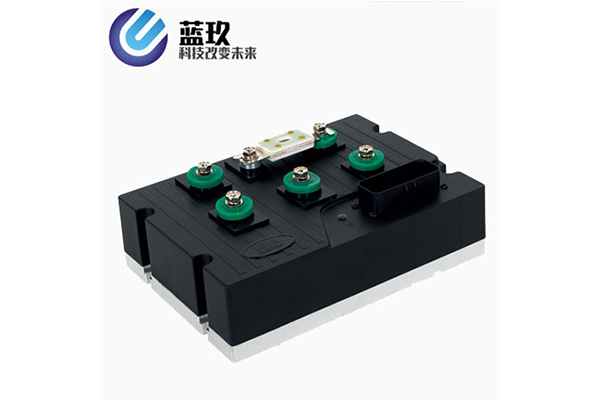
一、确定低压直流伺服电机选型结构1、确定机构的运动模式(定位距离与时间、机械传动等)2、确定各部位结构尺寸(电机安装空间、减速比等)3、电机需负载的重量与大小及各种影响因素(如摩擦系数、附加负载等)4、电机的安装方向(垂直安装时需考虑引力等影响)5、以上计算负载转TL6、 以上计算负载惯量JL。
AGV机器人低压直流伺服电机将脉冲信号转换为角位移或线性位移。首先,过载是好的。速度不受负载大小的影响。与普通电动机不同,当负载增加时,速度将下降。步进电机对速度和位置有严格的要求。第二是方便控制。 步进电机以“步长”为单位旋转,数字功能更加明显。第三,整机结构简单。传统的机械速度和位置控制结构复杂且难以调整。使用步进电机后,整机结构简单紧凑。 转速表电机将速度转换为电压,并将其作为反馈信号传递给输入。

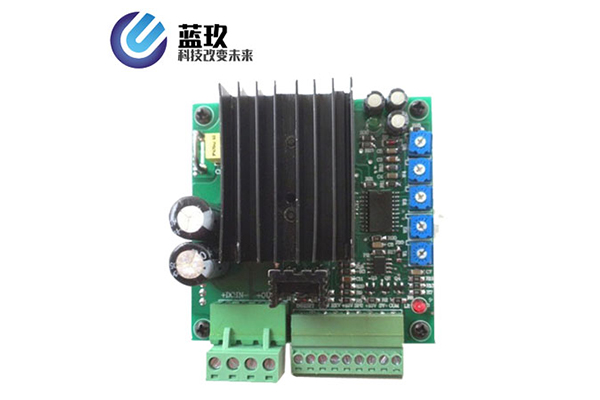
日常使用中,我们可以通过以下方法延长电机的寿命,提高电机的使用效率。AGV机器人低压直流伺服电机方法:1、熟悉直流无刷减速电机结构特点和检修技术要求;2、选择电机解体的工作地点,清理现场环境;3、为了进一步了解直流无刷电机运行中的缺陷,有条件时可在拆卸前做一次检查试验;4、直流无刷电机在拆卸前,要用压缩空气吹净电机表面灰尘,并将表面污垢擦拭干净;5、准备好解体所需工具(包括专用工具)和设备;6、切断电源,拆除电机外部接线,做好记录。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
