13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号
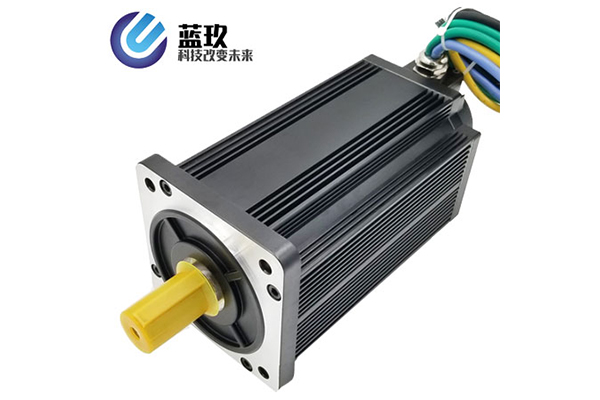
1.拆卸电动机时,从轴伸端或非伸端取出转子都可以。2.步进电机使用环境应经常保持干燥,电动机表面应保持清洁,进风口不应受尘土、纤维等阻碍。3.当电动机的热保护连续发生动作时,应查明故障来自电动机还是超负荷或保护装置整定值太低,消除故障后,方可投入运行。4.当步进电机轴承的寿命终了时,电动机运行的振动及噪声将明显增大,检查轴承的径向游隙达到下列值时,即应更换轴承。5.更换绕组时必须记下原绕组的形式,尺寸及匝数,线规等,当这些数据丢失时,应向轮毂电机专用索取,随意更改原设计绕组,常常使电动机某项或几项性能恶化,甚至于无法使用。
下面就由轮毂电机专用为您讲解一下步进电机的缺点。1、步进电机在正常情况下运转不能达到比较高的转速。2、步进电机在体积重量方面没有什么优势,能源利用率比较低。3、步进电机如果超过负载时的话,就会破坏同步情况,导致在高速工作的时候产生振动以及噪声。4、步进电机如果控制不好的话,就会产生共振的情况。
AGV机器人轮毂电机分为两相、三相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度,混合式步进电机随着相数(通电绕组数)的增加,步进角减小,精度提高,这种步进电机的应用最为广泛。混合式步进电机综合了反应式和永磁式步进电机两者的优点:极对数等于转子齿数,可以根据需要在很大范围内变化;绕组电感随转子位置变化较小,易于实现最佳运行控制;轴向充磁磁路,使用高磁能积的新型永磁材料,有利于电机性能的提高;转子磁钢提供励磁;在整个运行区域没有明显的振荡。

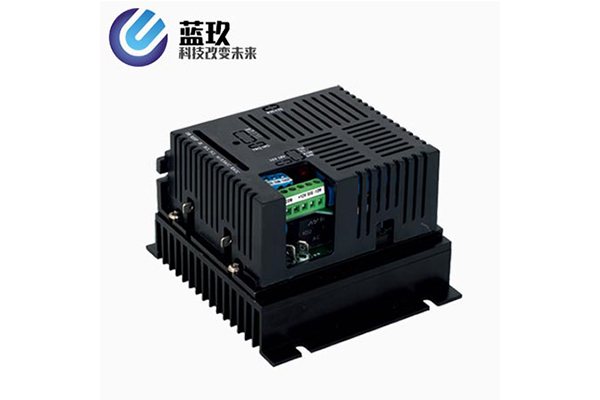
这里主要通过阐述轴装减速电机与工作机的安装关系,轴装减速电机与工作机的联接,反力矩支架的安装这三大方面来讲述。下面是轮毂电机专用来详细描述一下如何来安装。轴装减速电机与工作机的安装关系。为了避免工作机主轴挠曲及在减速机轴承上产生附加力,减速机与工作机之间的距离,在不影响正常的工作的条件下应尽量小,其值为5-10mm。二、轴装减速电机与工作机的联接减速机直接套装在工作机主轴上,当减速机运转时,作用在减速机箱体上的反力矩,又安装在减速机箱体上的反力矩支架或由其他方法来平衡。机直接相配,另一端与固定支架联接。三、反力矩支架的安装。反力矩支架应安装在减速机朝向的工作机的那一侧,以减小附加在工作机轴上的弯矩。反力矩支架与固定支承联接端的轴套使用橡胶等弹性体,以防止发生挠曲并吸收所产生的转矩波动。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
