13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号
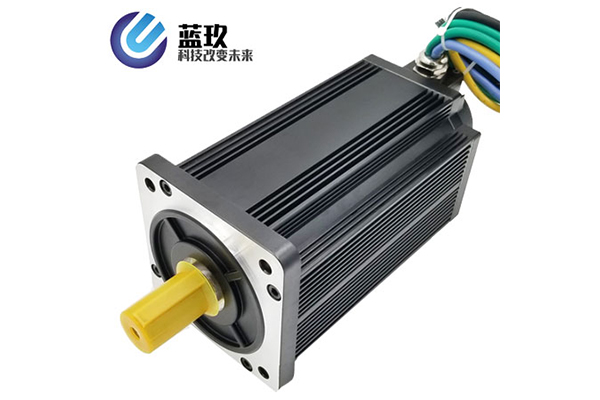
伺服驱动器厂家发热虽然一般不会影响电机的寿命,对大多数客户来说没必要理会。但是,严重的发热会带一些负面影响。如电机内部各部分热膨胀系数不同导致结构应力的变化和内部气隙的微小变化,会影响电机的动态响应,高速会容易失步。又如有些场合不允许电机的过度发热,如器械和的测试设备等。因此对电机的发热应当进行必要的控制。

怎样解决AGV机器人伺服驱动器早期点蚀的状况。点蚀肯定与润滑油有关系,同时它还要与减速机的材料有密切联系。平时的使用过程一会有一定处理规范。还有一点就是由于齿轮接触不好造成局部超负荷而产生的,齿轮的局部超负荷使实际接触应力大大超过齿轮材料的许用接触应力,有的齿轮达不到全齿长接触或仅在齿的一端接触,甚至对角接触。

我们在选择步进电机的时候需要考虑哪些问题呢?下面伺服驱动器厂家来为您浅谈;一、结构:电机的结构是分为两种的,消费者可以根据自身需求要进行选择,购买前做好功课是比较好的,并且可以让有经验的人指导一下这样会比较好。二、价格:所谓一分钱一分货,但是小编并不是让您感觉价格越贵的就越好,消费者需要结合自身的经济条件以及需求来购买,这样才能够保证利益。三、售后:售后服务是非常重要的,货物运输以及安装就是售后服务,确保到手的设备能够马上的进入工作图案。
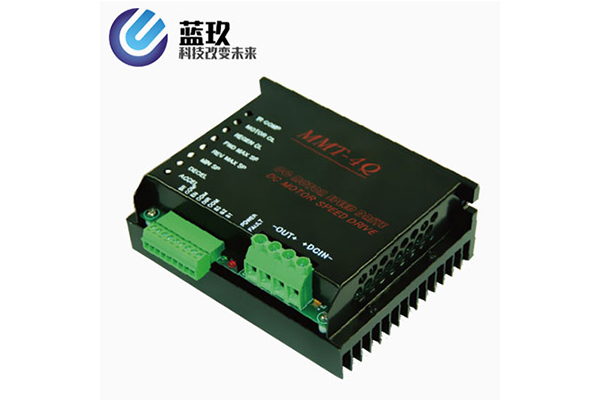
AGV机器人伺服驱动器的电枢绕组内感应的是交流电,通过点电刷与换向器的机械作用,使流入外电路的电流为直流电流。所谓换向,就是用机械方面,强制地使一个线圈中的电流在极断时间内从一个数值变换到另一数值。关于直流减速电机来说,换向前后的电流巨细持平,方向相反。直流电机的换向缺点,主要是指电刷下的换向火花逾越标准。
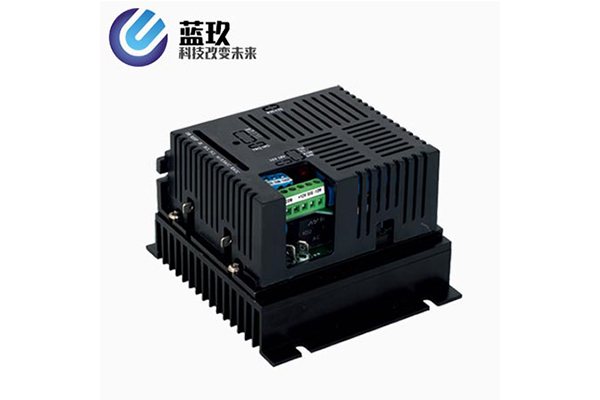
根据结构形式和最终负载的速度和加速度要求,计算电机所需功率和速度。值得注意的是,通常情况下需要结合所选AGV机器人伺服驱动器的速度选取减速机的减速比。在实际选型过程中,比如负载为水平运动,因为各个传动机构的摩擦系数和风载系数的不确定性,公式P=T*N/9549往往无法明确计算(无法精确计算扭矩的大小)。而在实践过程中,也发现使用AGV机器人伺服驱动器所需功率最大处往往是加减速阶段。所以,T=F*R=m*a*R可定量计算所需电机的功率大小和减速机的减速比(m:负载质量;a:负载加速度;R:负载旋转半径)。
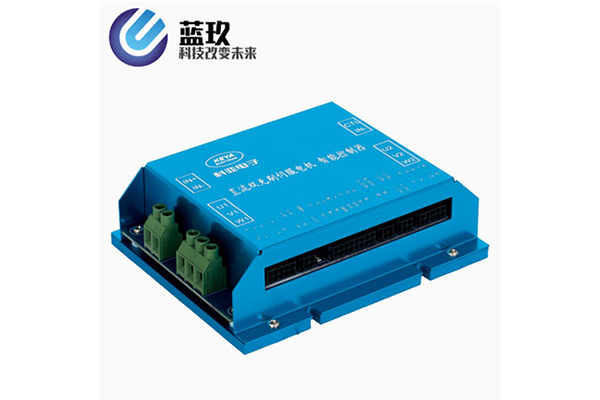
伺服驱动器厂家的组成1、控制器通常是计算机或PID控制电路,主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。伺服驱动系统的组成2、功率放大是将输入的指令信号与系统的反馈信号进行比较后进行功率放大。伺服驱动系统的组成3、执行元件作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。伺服驱动系统的组成4、机械部件是指被控制的机构或装置,是直接完成系统目的的主体。一般包括传动系统、执行装置和负载。伺服驱动系统的组成5、检测环节是指能够对输出进行测量,并转换成比较环节所需要的量纲的装置。一般包括传感器和转换电路。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
