13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号

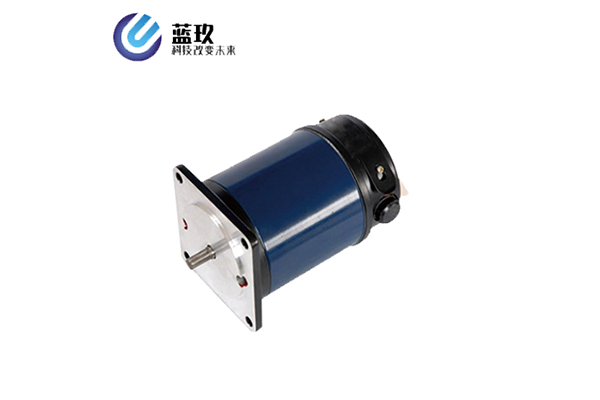
AGV机器人低压伺服驱动器具有结构简单、传动平稳、能缓冲吸振、可以在大的轴间距和多轴间传递动力,且其造价低廉、不需润滑、维护容易等特点,在近代机械传动中应用十分广泛。摩擦型带传动能过载打滑、运转噪声低,但传动比不准确(滑动率在2%以下);同步带传动可保证传动同步,但对载荷变动的吸收能力稍差,高速运转有噪声。 带传动除用以传递动力外,有时也用来输送物料、进行零件的整列等。
AGV机器人低压伺服驱动器是常用的动力源-电机,一般四极电机转速在1400转每分钟(前提是50HZ,频率会影响电机转速,这点在变频器上应用),但是你的工作机并不需要这么快,如果使用变频器的话,有很多限制,无论频率变低还是变高,都会导致电压变化,从而使电机输出功率变低,而且不能长期使用,电机容易烧坏;其次,从公式P=(V*M)/(9550*η )可知,精密行星减速器在功率和效率固定的情况下,速度和力矩是成反比的,降低转速的同时,将获得更大的力矩,也就是说,你可以用更小的原动机带动更大的工作机。AGV机器人低压伺服驱动器还能满足你对换向的需要,很多机器设备由于安装空间,设计原理等原因,安装形式特别,这时候一款合适的减速机可以满足你的所有需求。

AGV机器人低压伺服驱动器的传动比是固定的,但在工程实际中,有些工作机往往需要在几种不同的转速下工作,这就需要根据使用要求在工作中随时调整原动机与工作机之间的传动比。AGV机器人低压伺服驱动器的结构,它主要由齿轮(或蜗杆)、轴、轴承、箱体等组成。箱体必须有足够的刚度,为保证箱体的刚度及散热,常在箱体外壁上制有加强肋。为方便锥齿轮减速机的制造、装配及使用,还在锥齿轮减速机上设置一系列附件,如检查孔、透气孔、油标尺或油面指示器、吊钩及起盖螺钉等。

AGV机器人低压伺服驱动器的电枢绕组内感应的是交流电,通过点电刷与换向器的机械作用,使流入外电路的电流为直流电流。所谓换向,就是用机械方面,强制地使一个线圈中的电流在极断时间内从一个数值变换到另一数值。关于直流减速电机来说,换向前后的电流巨细持平,方向相反。直流电机的换向缺点,主要是指电刷下的换向火花逾越标准。

AGV机器人低压伺服驱动器:直流减速电机的规格型号比较多,而且各有各的优点,那么,选择时需要考虑什么呢?1、选购前确定直流减速电机的使用途径,应用场景,列出环境要求等因素;2、首先确定需要什么样的直流减速机,比如小功率、扭矩大、转速低、噪音、耗能、参数等功率、性能要求;3、确定直直流减速电机输出轴扭矩、安转方式、维护保养方式;4、确定输入传动轴转速和减速比;5、根据机法兰大小选直流减速电机,如输出轴扭矩不足回到重新匹配;6、工作温度、背隙等是否满足(也可放在第一步);以上便是直流电机调速器:直流减速电机在选择时需要考虑什么的主要内容。

您知道低压伺服驱动器厂家上电报警的原因吗?我们可以根据驱动器的指示灯提示来判断,其实并不是每一次都会报警的,如果出现报警的时候,并且确保接线是没有错的,电机也没有坏掉,那么就很有可能是因为电源部分而导致报警。很多用户会选择重新定制110V的开关电源,但是还是会但是多定制的电源不稳定,这时候我们就会先换一个电源开关,这个时候设备依旧会出现报警的现象。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
