13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号

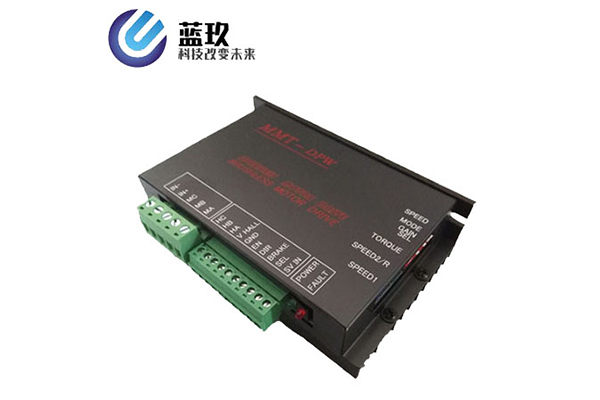
AGV机器人低压伺服驱动器有以下几点需要注意:a) 电机的功率富余系数;b) 考虑机构的传动效率;c) 减速机的输入和输出扭矩是否达标,并有一定的安全系数;d) 后期是否会有加大速度的可能性。值得一提的是,在传统行业中,例如起重机等行业,使用普通的感应电机驱动,加速度无明确要求,计算过程使用的是经验公式。注:负载垂直运行的情况下,注意把重力加速度计算在内。
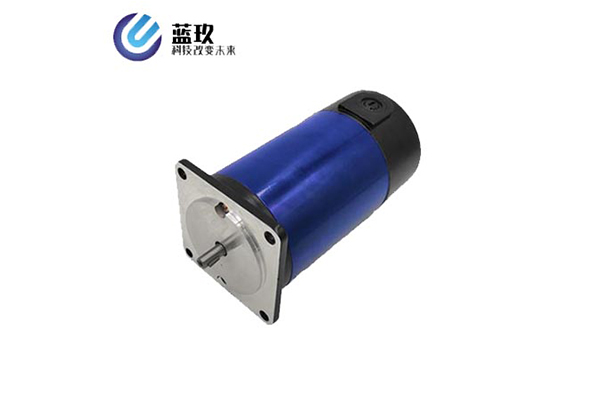
AGV机器人低压伺服驱动器是常用的动力源-电机,一般四极电机转速在1400转每分钟(前提是50HZ,频率会影响电机转速,这点在变频器上应用),但是你的工作机并不需要这么快,如果使用变频器的话,有很多限制,无论频率变低还是变高,都会导致电压变化,从而使电机输出功率变低,而且不能长期使用,电机容易烧坏;其次,从公式P=(V*M)/(9550*η )可知,精密行星减速器在功率和效率固定的情况下,速度和力矩是成反比的,降低转速的同时,将获得更大的力矩,也就是说,你可以用更小的原动机带动更大的工作机。AGV机器人低压伺服驱动器还能满足你对换向的需要,很多机器设备由于安装空间,设计原理等原因,安装形式特别,这时候一款合适的减速机可以满足你的所有需求。
1.拆卸电动机时,从轴伸端或非伸端取出转子都可以。2.步进电机使用环境应经常保持干燥,电动机表面应保持清洁,进风口不应受尘土、纤维等阻碍。3.当电动机的热保护连续发生动作时,应查明故障来自电动机还是超负荷或保护装置整定值太低,消除故障后,方可投入运行。4.当步进电机轴承的寿命终了时,电动机运行的振动及噪声将明显增大,检查轴承的径向游隙达到下列值时,即应更换轴承。5.更换绕组时必须记下原绕组的形式,尺寸及匝数,线规等,当这些数据丢失时,应向低压伺服驱动器选型索取,随意更改原设计绕组,常常使电动机某项或几项性能恶化,甚至于无法使用。

AGV机器人低压伺服驱动器传动比大,结构紧凑。蜗杆头数用Z1表示,蜗轮齿数用Z2表示。从传动比公式I=Z2/Z1可以看出,当Z1=1,即蜗杆为单头,蜗杆须转Z2转蜗轮才转一转,因而可得到很大传动比,一般在动力传动中,取传动比I=10-80;在分度机构中,I可达1000。这样大的传动比如用齿轮传动,则需要采取多级传动才行,所以蜗杆传动结构紧凑,体积小、重量轻。传动平稳,无噪音。因为蜗杆齿是连续不间断的螺旋齿,它与蜗轮齿啮合时是连续不断的,蜗杆齿没有进入和退出啮合的过程,因此工作平稳,冲击、震动、噪音小。

AGV机器人低压伺服驱动器是一种应用广泛的工业产品,同时具有工业品的价格,被广泛应用于工业场合。行星减速机主要传动结构:太阳轮、行星轮和齿轮环组成。行星减速机具有体积小、扭矩大、惯性矩小、背隙小、精度高、效率高、噪音低、寿命长、免维护、可随意安装等优点。适用于各种牌号的伺服电机和步进电机。AGV机器人低压伺服驱动器的作用是实现伺服,即精准定位。行星减速机的输出速度和转矩可根据需要进行调整。由于电机的转速输出通常是恒定的(只有几个齿轮),实际需要的转速相差很大,所以行星减速机需要调整到所需的转速范围。当伺服电机负载较大时,盲目增大伺服电机功率以满足要求的转矩会造成成本浪费。因此,在要求的速度范围内选择适合减速比的伺服减速机是合理的。伺服减速机本身的作用是减速和增加输出扭矩。

低压伺服驱动器选型随速度变化的情况采用恒流驱动技术时,步进电机在静态和低速下,电流会维持相对恒定,以保持恒力矩输出。速度高到一定程度,电机内部反电势升高,电流将逐步下降,力矩也会下降。因此,因铜损带来的发热情况就与速度相关了。静态和低速时一般发热高,高速时发热低。但是铁损(虽然占的比例较小)变化的情况却不尽然,而电机整个的发热是二者之和,所以上述只是一般情况。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
