13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号
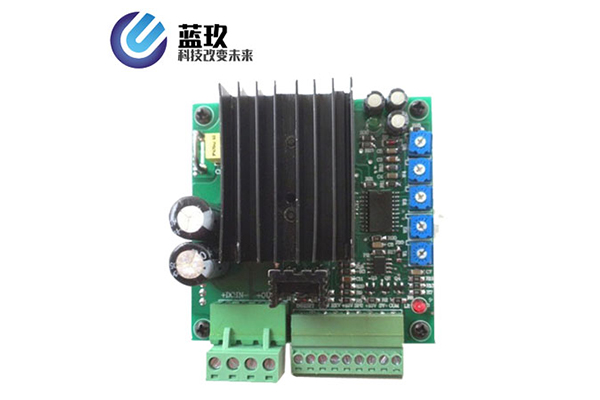
在转子S极端也是同样道理,当绕组齿对齿时,其旁边一相磁极错位1.8°。大功率伺服驱动器必须有驱动器和控制器才能正常工作。驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电,控制电机转动。步进电机 42BYG250C的驱动器为SH20403。为10V~40V直流供电, A+、A-、B+、B-端 子要连接步进电机的四条引线,DC+、DC-端子接驱动器工作直流电源,输入接口电路包括公共端、脉冲信号输入端,内部、方向信号输入端脱机信号输入端。
您知道伺服驱动器专用上电报警的原因吗?我们可以根据驱动器的指示灯提示来判断,其实并不是每一次都会报警的,如果出现报警的时候,并且确保接线是没有错的,电机也没有坏掉,那么就很有可能是因为电源部分而导致报警。很多用户会选择重新定制110V的开关电源,但是还是会但是多定制的电源不稳定,这时候我们就会先换一个电源开关,这个时候设备依旧会出现报警的现象。

大功率伺服驱动器蜗杆传动特点。具有自锁性。蜗杆的螺旋升角很小时,蜗杆只能带动蜗轮传动,而蜗轮不能带动蜗杆转动。蜗杆传动效率低,一般认为蜗杆传动效率比齿轮传动低。尤其是具有自锁性的蜗杆传动,其效率在0.5以下,一般效率只有0.7~0.9。发热量大,齿面容易磨损,成本高。
一、确定伺服驱动器专用结构1、确定机构的运动模式(定位距离与时间、机械传动等)2、确定各部位结构尺寸(电机安装空间、减速比等)3、电机需负载的重量与大小及各种影响因素(如摩擦系数、附加负载等)4、电机的安装方向(垂直安装时需考虑引力等影响)5、以上计算负载转TL6、 以上计算负载惯量JL。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
