13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号

这里主要通过阐述轴装减速电机与工作机的安装关系,轴装减速电机与工作机的联接,反力矩支架的安装这三大方面来讲述。下面是电动船用无刷电机专用来详细描述一下如何来安装。轴装减速电机与工作机的安装关系。为了避免工作机主轴挠曲及在减速机轴承上产生附加力,减速机与工作机之间的距离,在不影响正常的工作的条件下应尽量小,其值为5-10mm。二、轴装减速电机与工作机的联接减速机直接套装在工作机主轴上,当减速机运转时,作用在减速机箱体上的反力矩,又安装在减速机箱体上的反力矩支架或由其他方法来平衡。机直接相配,另一端与固定支架联接。三、反力矩支架的安装。反力矩支架应安装在减速机朝向的工作机的那一侧,以减小附加在工作机轴上的弯矩。反力矩支架与固定支承联接端的轴套使用橡胶等弹性体,以防止发生挠曲并吸收所产生的转矩波动。
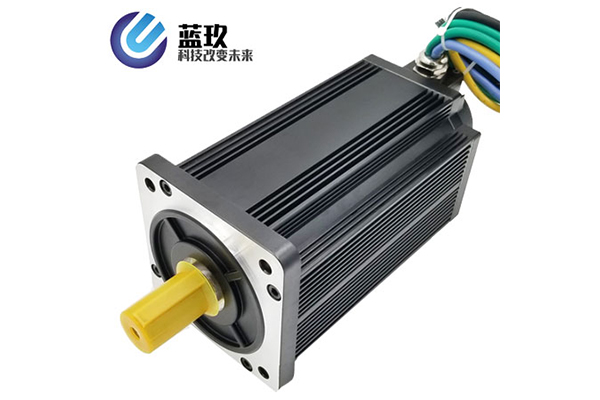
电动船用无刷电机专用随速度变化的情况采用恒流驱动技术时,步进电机在静态和低速下,电流会维持相对恒定,以保持恒力矩输出。速度高到一定程度,电机内部反电势升高,电流将逐步下降,力矩也会下降。因此,因铜损带来的发热情况就与速度相关了。静态和低速时一般发热高,高速时发热低。但是铁损(虽然占的比例较小)变化的情况却不尽然,而电机整个的发热是二者之和,所以上述只是一般情况。
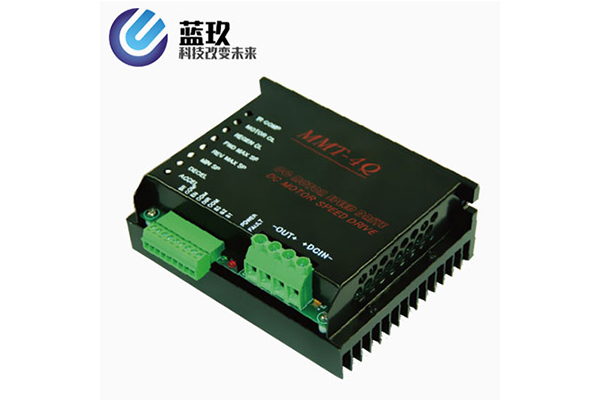
AGV机器人电动船用无刷电机的使用是非常广泛的,在市场竞争非常激烈的环境下面能脱颖而出,那就说明设备具有独特的优势。1、响应仅由数字输入脉冲确定,所以在运转时可以采用开环控制,这样一来就使得电机的结构可以比较简单而且控制成本。2、在运转的时候,电机旋转的角度正比于脉冲数,而且当有绕组激磁时,电机停转的时候具有最大的转矩。3、每步的精度在百分之三到百分之五,而且不会将一步的误差积累到下一步因而有较好的位置精度和运动的重复性。
AGV机器人电动船用无刷电机在低速运行时会有抖动和噪音的现象,如何解决:1、首先排查步进电机的安装环境,是否在共振区,可以通过增加变速器的方法去提高步进电机的运行转速2、如果电机的安排环境正常,可以通过使用带有细分功能的步进电机驱动器,调整驱动器的细分来解决。是目前较为简单的方法。3、可以在电机轴上加上一个特制的磁性阻尼器去减小噪音以及振动。4、调整步进电机的歩距角来解决。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
