13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号

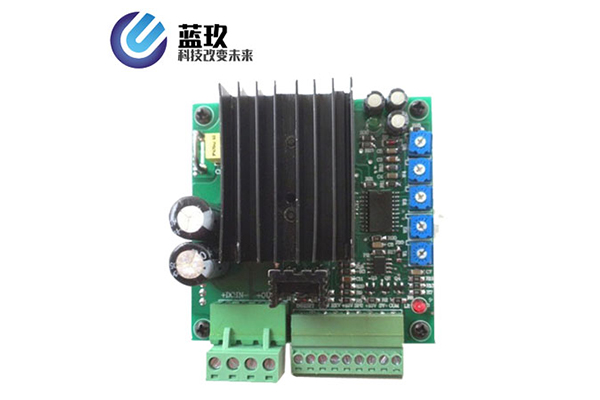
AGV机器人直流无刷驱动器的电枢绕组内感应的是交流电,通过点电刷与换向器的机械作用,使流入外电路的电流为直流电流。所谓换向,就是用机械方面,强制地使一个线圈中的电流在极断时间内从一个数值变换到另一数值。关于直流减速电机来说,换向前后的电流巨细持平,方向相反。直流电机的换向缺点,主要是指电刷下的换向火花逾越标准。

AGV机器人直流无刷驱动器依照励磁方法的不同,能够分为永磁式直流电动机和电磁式直流电动机两种类型,永磁式直流电动机的磁极主要是由永久磁铁来组成的,不需要励磁绕组和励磁电源。AGV机器人直流无刷驱动器通常是采用他励结构,这类直流电动机的磁极主要是由励磁绕组来构成的,是经过独自的励磁电源来供给电源的,依照电动机转子的结构的不同,直流电动机能够分为空心杯形转子直流电动机以及无槽电枢直流电动机,其间空心杯形转子直流电动机由于力能指标较低,现在现已很少使用了。
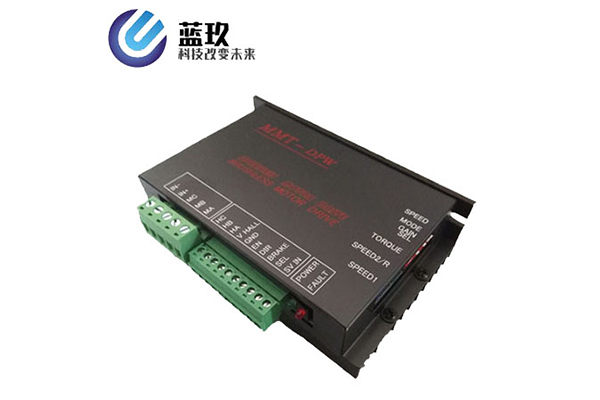
AGV机器人直流无刷驱动器在插电工作前应做的检查 1、电源电压是否合适,对于直流输入的+/-极性一定不能接错,驱动控制器上的电机型号或电流设定值是否合适。2、控制信号线接牢靠,工业现场最好要考虑屏蔽问题。3、不要开始时就把需要接的线全接上,只连成最基本的系统,运行良好后,再逐步连接。4、一定要搞清楚接地方法,还是采用浮空不接。5、开始运行的半小时内要密切观察电机的状态,如运动是否正常,声音和温升情况,发现问题立即停机调整。
一、材料及处理规范的影响。齿轮材料的选择正确与否以及使用负荷的匹配情况,热处理硬度的选择与匹配,也是影响早期点蚀的原因。二、润滑油的影响。由于齿轮传动的不合理润滑及润滑剂的选择不适也是影响早期点蚀的原因。防止AGV机器人直流无刷驱动器早期点蚀的途径:(一)齿轮减速机传动的合理润滑及选择合适的润滑剂。(二)提高减速机齿轮安装精度,保证齿轮的接触精度。

这里主要通过阐述轴装减速电机与工作机的安装关系,轴装减速电机与工作机的联接,反力矩支架的安装这三大方面来讲述。下面是直流无刷驱动器专用来详细描述一下如何来安装。轴装减速电机与工作机的安装关系。为了避免工作机主轴挠曲及在减速机轴承上产生附加力,减速机与工作机之间的距离,在不影响正常的工作的条件下应尽量小,其值为5-10mm。二、轴装减速电机与工作机的联接减速机直接套装在工作机主轴上,当减速机运转时,作用在减速机箱体上的反力矩,又安装在减速机箱体上的反力矩支架或由其他方法来平衡。机直接相配,另一端与固定支架联接。三、反力矩支架的安装。反力矩支架应安装在减速机朝向的工作机的那一侧,以减小附加在工作机轴上的弯矩。反力矩支架与固定支承联接端的轴套使用橡胶等弹性体,以防止发生挠曲并吸收所产生的转矩波动。
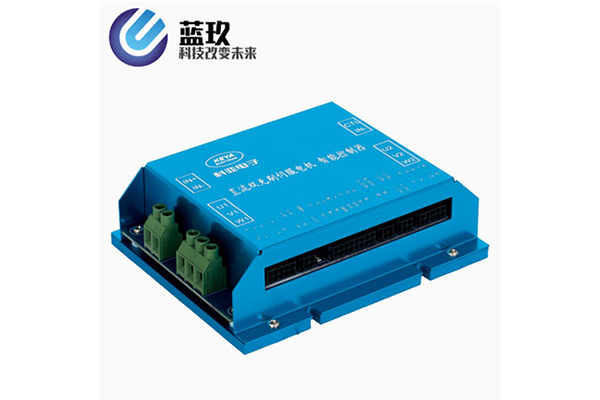
直流无刷驱动器专用可以将电能转换成机械能也可以将机械能转换成电能,并且跟着它的不断完善运用规划也在不断的扩展,本文就为我们介绍一下它的电枢反应,一起来了解下吧。在了解电枢反应之前应该先了解它的励磁绕组,励磁绕组几个通直流电的线圈(并励串励或复励)是固定不动的部分,而电枢绕组是装有换向器的绕组是翻滚的部分。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
