13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号
AGV机器人无刷减速电机工作数据。必须完成精密行星减速器的总装配图,零件装配图,零件图,材料BOM等,并且必须保证整个减速机图纸的工艺信息记录的完整性,清洁度和完整性。装配现场。精密行星减速器的组件和组件的组装必须在指定的装配站中进行。整个机器的放置和组装地点必须明确规划,直到项目结束,所有工作场地必须整洁,规范和有序。装配材料。在操作之前,根据精密行星减速器组装过程的组装材料必须按时到位。如果某些组件不到位,则可以更改操作顺序。在组装之前了解精密行星减速机的结构,装配技术和工艺要求。这不会导致装配错误并导致不必要的麻烦。相对其他减速机,精密行星减速机具有高刚性、高精度(单级可做到1分以内)、高传动效率(单级在97%-98%)、高的扭矩/体积比、终身免维护等特点。多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量。
中小功率的无刷减速电机选型一般无单独的控制电源键入端,其控制电源在伺服电机变频器內部立即与键入电源联接,但针对55kw以上的功率伺服电机变频器,应在伺服电机变频器的连接端R/L1、S/L2上联接单独的控制电源。控制电源单独键入时其控制电压有AC200V与AC400V二种挑选,应依据具体联接状况的接线端安裝,挑选控制电压。
1、AGV机器人无刷减速电机比较器反相输入端设置有100mV基准电压,作为减速机电流限流基准;2、减速机外接逆变桥经一电阻Rs接地作电流采样,采样电压输入至电流检测比较器;3、在锯齿波下降时间,从头将触发器置位,使驱动输出注册;4、在振荡器锯齿波上升时间内,若减速机电流过大,此比较器翻转,使下Rs触发器重置,将驱动输出关闭,以束缚电流持续增大。

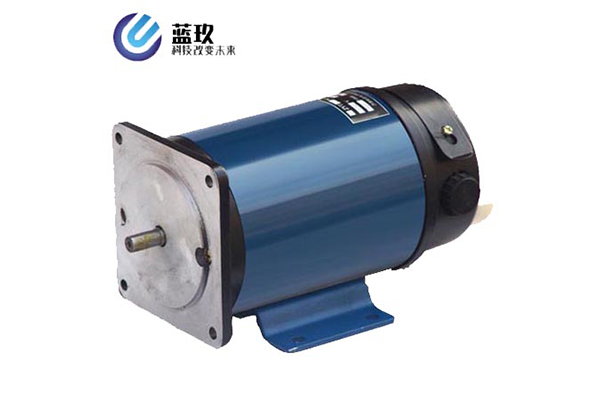
根据结构形式和最终负载的速度和加速度要求,计算电机所需功率和速度。值得注意的是,通常情况下需要结合所选AGV机器人无刷减速电机的速度选取减速机的减速比。在实际选型过程中,比如负载为水平运动,因为各个传动机构的摩擦系数和风载系数的不确定性,公式P=T*N/9549往往无法明确计算(无法精确计算扭矩的大小)。而在实践过程中,也发现使用AGV机器人无刷减速电机所需功率最大处往往是加减速阶段。所以,T=F*R=m*a*R可定量计算所需电机的功率大小和减速机的减速比(m:负载质量;a:负载加速度;R:负载旋转半径)。

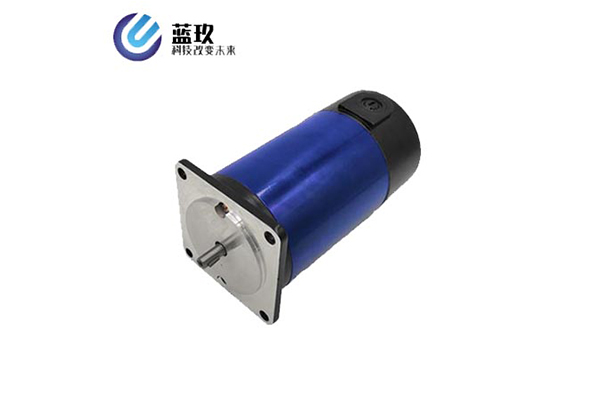
AGV机器人无刷减速电机分为两相、三相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度,混合式步进电机随着相数(通电绕组数)的增加,步进角减小,精度提高,这种步进电机的应用最为广泛。混合式步进电机综合了反应式和永磁式步进电机两者的优点:极对数等于转子齿数,可以根据需要在很大范围内变化;绕组电感随转子位置变化较小,易于实现最佳运行控制;轴向充磁磁路,使用高磁能积的新型永磁材料,有利于电机性能的提高;转子磁钢提供励磁;在整个运行区域没有明显的振荡。
中小功率的AGV机器人无刷减速电机变频器一般无单独的控制电源键入端,其控制电源在伺服电机变频器內部立即与键入电源联接,但针对55kw以上的功率伺服电机变频器,应在伺服电机变频器的连接端R/L1、S/L2上联接单独的控制电源。控制电源单独键入时其控制电压有AC200V与AC400V二种挑选,应依据具体联接状况的接线端安裝,挑选控制电压。启动显示的确认伺服电机变频器在电源接入后的显示为頻率给出显示页面,假如显示的是其他情况,应最先故障检测,随后才可以进到迅速调试模式。自动调节。在迅速调节的基础设置进行后,可依据具体必须,决策是不是必须进行电动机自动调节实际操作。或运用高级设置方式(ADV)改动有关主要参数。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
