13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号

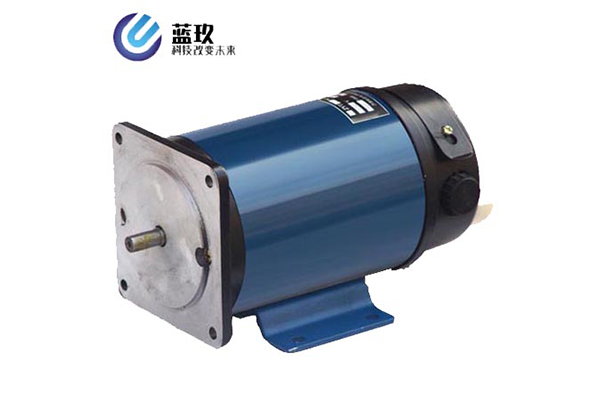
那么我们在使用电动船用无刷驱动器选型有什么注意事项呢?1、电源电压要合适,直流输入的+/-极性不得接错,驱动控制器的电流设定值应该合适。2、控制信号线接牢靠,工业环境下应考虑屏蔽问题。3、不要一开始就把所有线全接上,可先进行最基本系统的连接,确认运行良好后再完成全部连接。4、必须事先确认好接地端和浮空端。5、刚开始运行时,仔细观察电机的声音和温升情况,发现异常应立即停机调整。
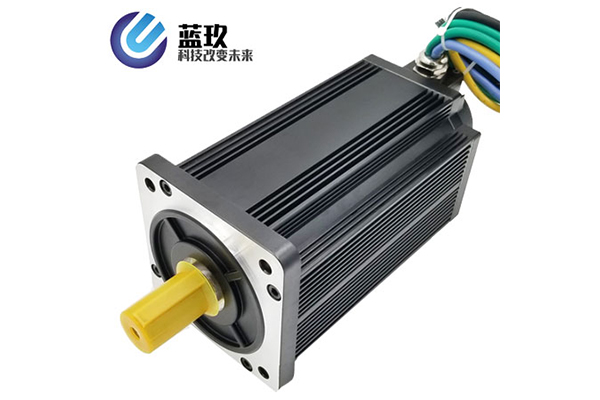
AGV机器人电动船用无刷驱动器是指依据电磁感应规则完结电能的变换或传递的一种电磁设备,它的首要作用是发作驱动转矩,作为用电器或各种机械的动力源,发电机在电路顶用字母来“G”标明。而直流减速电机是一种动力传达安排,运用齿轮的速度变换器,将电机的回转数减速到所要的回转数,并得到较大转矩的安排,直流减速机电机的作用首要有:1、减速一同前进输出扭矩,扭矩输出比例按电机输出乘减速比,但要留意不能超出减速机额定扭矩。2、减速一同降低了负载的惯量,惯量的削减为减速比的平方。
一、材料及处理规范的影响。齿轮材料的选择正确与否以及使用负荷的匹配情况,热处理硬度的选择与匹配,也是影响早期点蚀的原因。二、润滑油的影响。由于齿轮传动的不合理润滑及润滑剂的选择不适也是影响早期点蚀的原因。防止AGV机器人电动船用无刷驱动器早期点蚀的途径:(一)齿轮减速机传动的合理润滑及选择合适的润滑剂。(二)提高减速机齿轮安装精度,保证齿轮的接触精度。
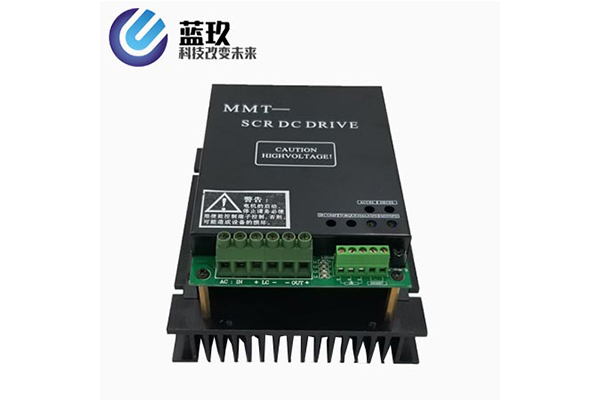
中小功率的AGV机器人电动船用无刷驱动器变频器一般无单独的控制电源键入端,其控制电源在伺服电机变频器內部立即与键入电源联接,但针对55kw以上的功率伺服电机变频器,应在伺服电机变频器的连接端R/L1、S/L2上联接单独的控制电源。控制电源单独键入时其控制电压有AC200V与AC400V二种挑选,应依据具体联接状况的接线端安裝,挑选控制电压。启动显示的确认伺服电机变频器在电源接入后的显示为頻率给出显示页面,假如显示的是其他情况,应最先故障检测,随后才可以进到迅速调试模式。自动调节。在迅速调节的基础设置进行后,可依据具体必须,决策是不是必须进行电动机自动调节实际操作。或运用高级设置方式(ADV)改动有关主要参数。

电动船用无刷驱动器选型的组成1、控制器通常是计算机或PID控制电路,主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。伺服驱动系统的组成2、功率放大是将输入的指令信号与系统的反馈信号进行比较后进行功率放大。伺服驱动系统的组成3、执行元件作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。伺服驱动系统的组成4、机械部件是指被控制的机构或装置,是直接完成系统目的的主体。一般包括传动系统、执行装置和负载。伺服驱动系统的组成5、检测环节是指能够对输出进行测量,并转换成比较环节所需要的量纲的装置。一般包括传感器和转换电路。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
