13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号

AGV机器人涡轮减速机将脉冲信号转换为角位移或线性位移。首先,过载是好的。速度不受负载大小的影响。与普通电动机不同,当负载增加时,速度将下降。步进电机对速度和位置有严格的要求。第二是方便控制。 步进电机以“步长”为单位旋转,数字功能更加明显。第三,整机结构简单。传统的机械速度和位置控制结构复杂且难以调整。使用步进电机后,整机结构简单紧凑。 转速表电机将速度转换为电压,并将其作为反馈信号传递给输入。
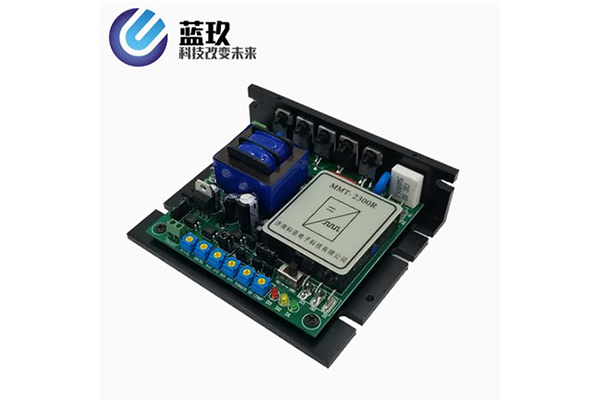
那么我们在使用涡轮减速机选型有什么注意事项呢?1、电源电压要合适,直流输入的+/-极性不得接错,驱动控制器的电流设定值应该合适。2、控制信号线接牢靠,工业环境下应考虑屏蔽问题。3、不要一开始就把所有线全接上,可先进行最基本系统的连接,确认运行良好后再完成全部连接。4、必须事先确认好接地端和浮空端。5、刚开始运行时,仔细观察电机的声音和温升情况,发现异常应立即停机调整。

AGV机器人涡轮减速机具有结构简单、传动平稳、能缓冲吸振、可以在大的轴间距和多轴间传递动力,且其造价低廉、不需润滑、维护容易等特点,在近代机械传动中应用十分广泛。摩擦型带传动能过载打滑、运转噪声低,但传动比不准确(滑动率在2%以下);同步带传动可保证传动同步,但对载荷变动的吸收能力稍差,高速运转有噪声。 带传动除用以传递动力外,有时也用来输送物料、进行零件的整列等。
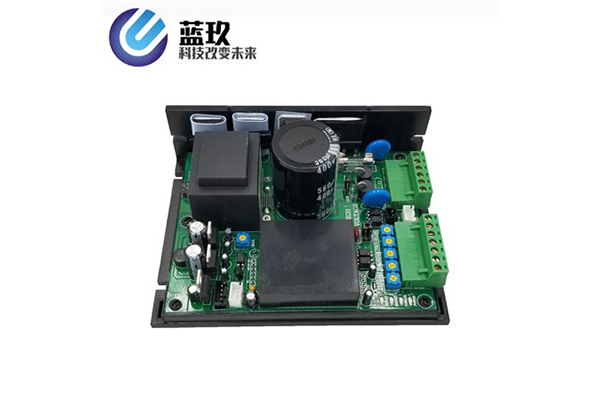
这里主要通过阐述轴装减速电机与工作机的安装关系,轴装减速电机与工作机的联接,反力矩支架的安装这三大方面来讲述。下面是涡轮减速机选型来详细描述一下如何来安装。轴装减速电机与工作机的安装关系。为了避免工作机主轴挠曲及在减速机轴承上产生附加力,减速机与工作机之间的距离,在不影响正常的工作的条件下应尽量小,其值为5-10mm。二、轴装减速电机与工作机的联接减速机直接套装在工作机主轴上,当减速机运转时,作用在减速机箱体上的反力矩,又安装在减速机箱体上的反力矩支架或由其他方法来平衡。机直接相配,另一端与固定支架联接。三、反力矩支架的安装。反力矩支架应安装在减速机朝向的工作机的那一侧,以减小附加在工作机轴上的弯矩。反力矩支架与固定支承联接端的轴套使用橡胶等弹性体,以防止发生挠曲并吸收所产生的转矩波动。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
