13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号

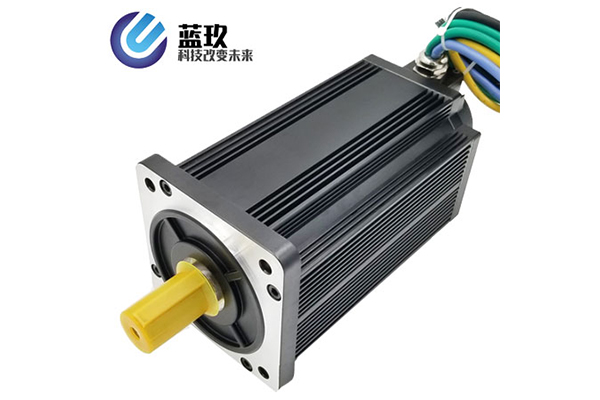
AGV机器人步进电机在低速运行时会有抖动和噪音的现象,如何解决:1、首先排查步进电机的安装环境,是否在共振区,可以通过增加变速器的方法去提高步进电机的运行转速2、如果电机的安排环境正常,可以通过使用带有细分功能的步进电机驱动器,调整驱动器的细分来解决。是目前较为简单的方法。3、可以在电机轴上加上一个特制的磁性阻尼器去减小噪音以及振动。4、调整步进电机的歩距角来解决。
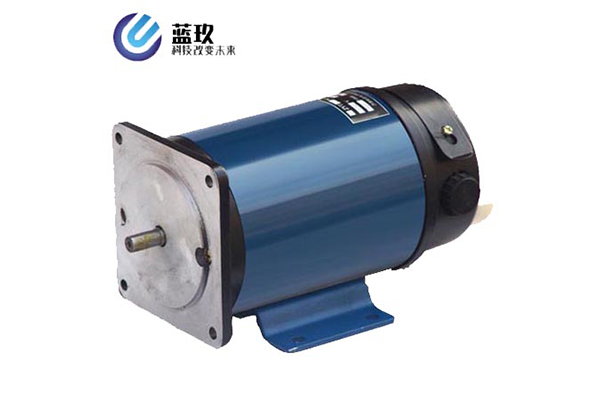
步进电机厂家可以将电能转换成机械能也可以将机械能转换成电能,并且跟着它的不断完善运用规划也在不断的扩展,本文就为我们介绍一下它的电枢反应,一起来了解下吧。在了解电枢反应之前应该先了解它的励磁绕组,励磁绕组几个通直流电的线圈(并励串励或复励)是固定不动的部分,而电枢绕组是装有换向器的绕组是翻滚的部分。
中小功率的步进电机厂家一般无单独的控制电源键入端,其控制电源在伺服电机变频器內部立即与键入电源联接,但针对55kw以上的功率伺服电机变频器,应在伺服电机变频器的连接端R/L1、S/L2上联接单独的控制电源。控制电源单独键入时其控制电压有AC200V与AC400V二种挑选,应依据具体联接状况的接线端安裝,挑选控制电压。

AGV机器人步进电机将脉冲信号转换为角位移或线性位移。首先,过载是好的。速度不受负载大小的影响。与普通电动机不同,当负载增加时,速度将下降。步进电机对速度和位置有严格的要求。第二是方便控制。 步进电机以“步长”为单位旋转,数字功能更加明显。第三,整机结构简单。传统的机械速度和位置控制结构复杂且难以调整。使用步进电机后,整机结构简单紧凑。 转速表电机将速度转换为电压,并将其作为反馈信号传递给输入。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
