13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号

如果AGV机器人无刷减速电机连续的时候那么肯定会出现温度上升的现象,那么抑制温度上升的方法是什么呢?需要选择转矩比较充裕的电机还需要减低运行的电流;可以通过减低电流的方法来抑制发热,但是要知道输出的转矩也会相对的降低,这时候需要在选型的时候就需要留意转矩的预留余量。在选择设备的时候需要选择高效率的设备,高效率的设备在选材方面也是非常有讲究的,是可以通过材料的最佳化来减低耗损,并且在发热方面也是相对的减少。
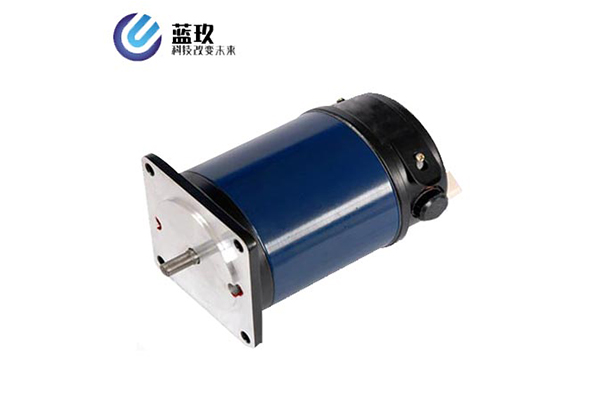
无刷减速电机选型的合理范围电机发热允许到什么程度,主要取决于电机内部绝缘等级。内部绝缘性能在高温下(30度以上)才会被破坏。所以只要内部不超过30度,电机便不会损坏,而这时表面温度会在90度以下。所以,步进电机表面温度在70-80度都是正常的。简单的温度测量方法有用点温计的,也可以粗略判断:用手可以触摸-2秒以上,不超过60度;用手只能碰一下,大约在70-80度;滴几滴水迅速气化,则90度以上了。

AGV机器人无刷减速电机的优点运行效率高:凭借着应用的科学工作原理,以及相对比较先进的产品技术,步进电机具备着运行效率高这个优点,这样一来电机在功能方面就非常高效,可以以高效的功能发挥,充分优化设备的运行。

AGV机器人无刷减速电机具有结构简单、传动平稳、能缓冲吸振、可以在大的轴间距和多轴间传递动力,且其造价低廉、不需润滑、维护容易等特点,在近代机械传动中应用十分广泛。摩擦型带传动能过载打滑、运转噪声低,但传动比不准确(滑动率在2%以下);同步带传动可保证传动同步,但对载荷变动的吸收能力稍差,高速运转有噪声。 带传动除用以传递动力外,有时也用来输送物料、进行零件的整列等。
对于AGV机器人无刷减速电机相信大部分人还不是很懂,那么对于步进电机的选项您知道吗?1、保证步进电机的输出功率大于负载所需的功率。 2、步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。3、机械负载的负载惯量和机床要求的启动频率,使之与AGV机器人无刷减速电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
