13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号
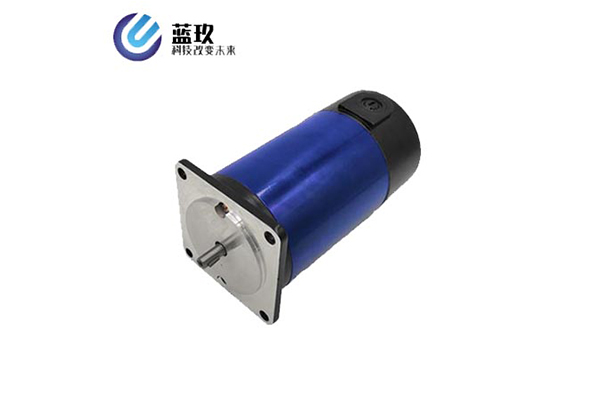
AGV机器人低压伺服驱动器将脉冲信号转换为角位移或线性位移。首先,过载是好的。速度不受负载大小的影响。与普通电动机不同,当负载增加时,速度将下降。步进电机对速度和位置有严格的要求。第二是方便控制。 步进电机以“步长”为单位旋转,数字功能更加明显。第三,整机结构简单。传统的机械速度和位置控制结构复杂且难以调整。使用步进电机后,整机结构简单紧凑。 转速表电机将速度转换为电压,并将其作为反馈信号传递给输入。
日常使用中,我们可以通过以下方法延长电机的寿命,提高电机的使用效率。AGV机器人低压伺服驱动器方法:1、熟悉直流无刷减速电机结构特点和检修技术要求;2、选择电机解体的工作地点,清理现场环境;3、为了进一步了解直流无刷电机运行中的缺陷,有条件时可在拆卸前做一次检查试验;4、直流无刷电机在拆卸前,要用压缩空气吹净电机表面灰尘,并将表面污垢擦拭干净;5、准备好解体所需工具(包括专用工具)和设备;6、切断电源,拆除电机外部接线,做好记录。
1、熟悉AGV机器人低压伺服驱动器结构特点和检修技术要求;2、选择电机解体的工作地点,清理现场环境;3、为了进一步了解直流无刷电机运行中的缺陷,有条件时可在拆卸前做一次检查试验;4、直流无刷电机在拆卸前,要用压缩空气吹净电机表面灰尘,并将表面污垢擦拭干净;5、准备好解体所需工具(包括专用工具)和设备;6、切断电源,拆除电机外部接线,做好记录。在电机的使用和维护过程中,有疑虑可以及时联络山社步进电机的工程师提供技术支持。

AGV机器人低压伺服驱动器是常用的动力源-电机,一般四极电机转速在1400转每分钟(前提是50HZ,频率会影响电机转速,这点在变频器上应用),但是你的工作机并不需要这么快,如果使用变频器的话,有很多限制,无论频率变低还是变高,都会导致电压变化,从而使电机输出功率变低,而且不能长期使用,电机容易烧坏;其次,从公式P=(V*M)/(9550*η )可知,精密行星减速器在功率和效率固定的情况下,速度和力矩是成反比的,降低转速的同时,将获得更大的力矩,也就是说,你可以用更小的原动机带动更大的工作机。AGV机器人低压伺服驱动器还能满足你对换向的需要,很多机器设备由于安装空间,设计原理等原因,安装形式特别,这时候一款合适的减速机可以满足你的所有需求。
低压伺服驱动器专用的合理范围电机发热允许到什么程度,主要取决于电机内部绝缘等级。内部绝缘性能在高温下(30度以上)才会被破坏。所以只要内部不超过30度,电机便不会损坏,而这时表面温度会在90度以下。所以,步进电机表面温度在70-80度都是正常的。简单的温度测量方法有用点温计的,也可以粗略判断:用手可以触摸-2秒以上,不超过60度;用手只能碰一下,大约在70-80度;滴几滴水迅速气化,则90度以上了。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
