13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号
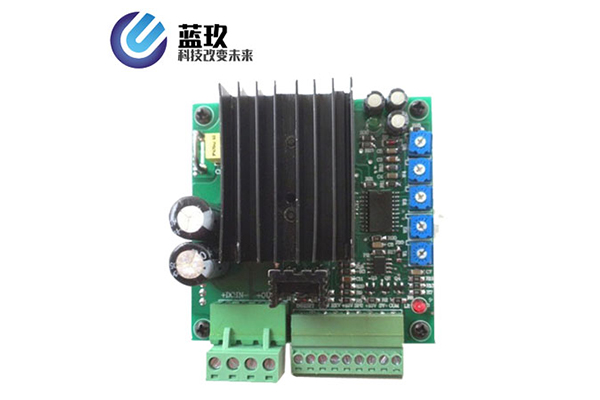
相信很多行业人士都知道步进电机已被广泛应用,它可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,那么我们选择AGV机器人Agv驱动器时有什么好处呢?1、电机旋转的角度正比于脉冲数。2、电机停转的时候具有最大的转矩(当绕组激磁时)3、每步的精度在百分之三到百分之五,而且不会将一步的误差积累到下一步因而有较好的位置精度和运动的重复性。4、没有电刷,可靠性较高,因此电机的寿命仅仅取决于轴承的寿命。

AGV机器人Agv驱动器在低速运行时会有抖动和噪音的现象,如何解决:1、首先排查步进电机的安装环境,是否在共振区,可以通过增加变速器的方法去提高步进电机的运行转速2、如果电机的安排环境正常,可以通过使用带有细分功能的步进电机驱动器,调整驱动器的细分来解决。是目前较为简单的方法。3、可以在电机轴上加上一个特制的磁性阻尼器去减小噪音以及振动。4、调整步进电机的歩距角来解决。

AGV机器人Agv驱动器具有结构简单、传动平稳、能缓冲吸振、可以在大的轴间距和多轴间传递动力,且其造价低廉、不需润滑、维护容易等特点,在近代机械传动中应用十分广泛。摩擦型带传动能过载打滑、运转噪声低,但传动比不准确(滑动率在2%以下);同步带传动可保证传动同步,但对载荷变动的吸收能力稍差,高速运转有噪声。 带传动除用以传递动力外,有时也用来输送物料、进行零件的整列等。
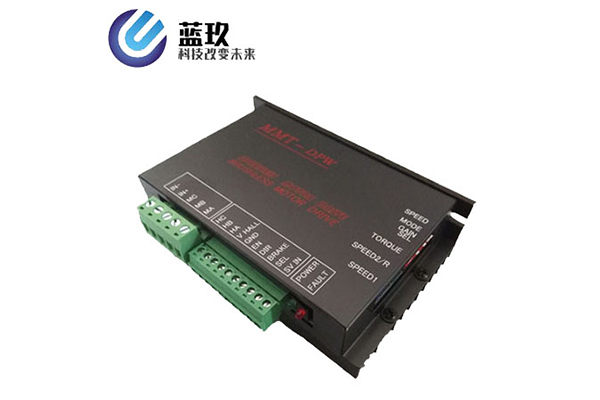
一、确定Agv驱动器专用结构1、确定机构的运动模式(定位距离与时间、机械传动等)2、确定各部位结构尺寸(电机安装空间、减速比等)3、电机需负载的重量与大小及各种影响因素(如摩擦系数、附加负载等)4、电机的安装方向(垂直安装时需考虑引力等影响)5、以上计算负载转TL6、 以上计算负载惯量JL。
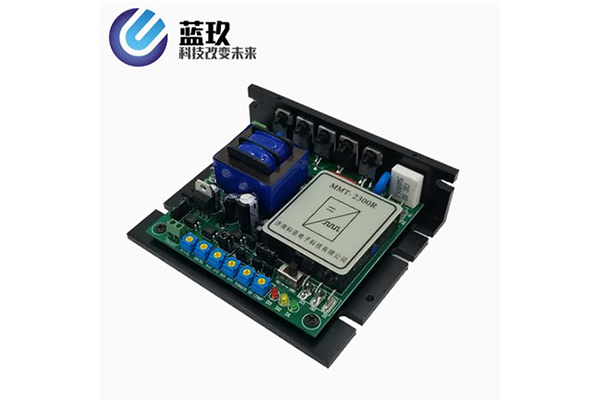
1.拆卸电动机时,从轴伸端或非伸端取出转子都可以。2.步进电机使用环境应经常保持干燥,电动机表面应保持清洁,进风口不应受尘土、纤维等阻碍。3.当电动机的热保护连续发生动作时,应查明故障来自电动机还是超负荷或保护装置整定值太低,消除故障后,方可投入运行。4.当步进电机轴承的寿命终了时,电动机运行的振动及噪声将明显增大,检查轴承的径向游隙达到下列值时,即应更换轴承。5.更换绕组时必须记下原绕组的形式,尺寸及匝数,线规等,当这些数据丢失时,应向Agv驱动器专用索取,随意更改原设计绕组,常常使电动机某项或几项性能恶化,甚至于无法使用。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
