13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号
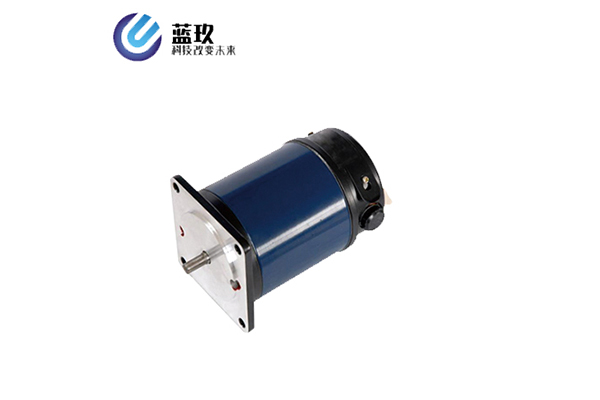
大功率直流无刷伺服电机传动比大,结构紧凑。蜗杆头数用Z1表示,蜗轮齿数用Z2表示。从传动比公式I=Z2/Z1可以看出,当Z1=1,即蜗杆为单头,蜗杆须转Z2转蜗轮才转一转,因而可得到很大传动比,一般在动力传动中,取传动比I=10-80;在分度机构中,I可达1000。这样大的传动比如用齿轮传动,则需要采取多级传动才行,所以蜗杆传动结构紧凑,体积小、重量轻。传动平稳,无噪音。因为蜗杆齿是连续不间断的螺旋齿,它与蜗轮齿啮合时是连续不断的,蜗杆齿没有进入和退出啮合的过程,因此工作平稳,冲击、震动、噪音小。

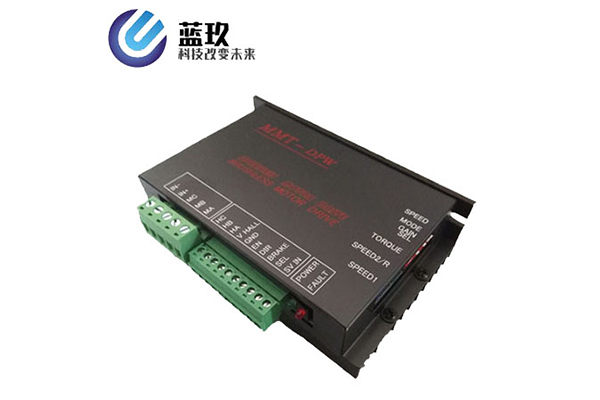
您知道直流无刷伺服电机选型上电报警的原因吗?我们可以根据驱动器的指示灯提示来判断,其实并不是每一次都会报警的,如果出现报警的时候,并且确保接线是没有错的,电机也没有坏掉,那么就很有可能是因为电源部分而导致报警。很多用户会选择重新定制110V的开关电源,但是还是会但是多定制的电源不稳定,这时候我们就会先换一个电源开关,这个时候设备依旧会出现报警的现象。
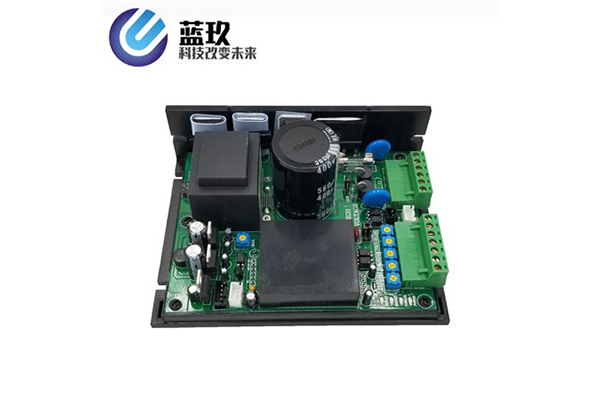
直流无刷伺服电机选型的组成1、控制器通常是计算机或PID控制电路,主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。伺服驱动系统的组成2、功率放大是将输入的指令信号与系统的反馈信号进行比较后进行功率放大。伺服驱动系统的组成3、执行元件作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。伺服驱动系统的组成4、机械部件是指被控制的机构或装置,是直接完成系统目的的主体。一般包括传动系统、执行装置和负载。伺服驱动系统的组成5、检测环节是指能够对输出进行测量,并转换成比较环节所需要的量纲的装置。一般包括传感器和转换电路。
大功率直流无刷伺服电机将脉冲信号转换为角位移或线性位移。首先,过载是好的。速度不受负载大小的影响。与普通电动机不同,当负载增加时,速度将下降。步进电机对速度和位置有严格的要求。第二是方便控制。 步进电机以“步长”为单位旋转,数字功能更加明显。第三,整机结构简单。传统的机械速度和位置控制结构复杂且难以调整。使用步进电机后,整机结构简单紧凑。 转速表电机将速度转换为电压,并将其作为反馈信号传递给输入。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
