13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号
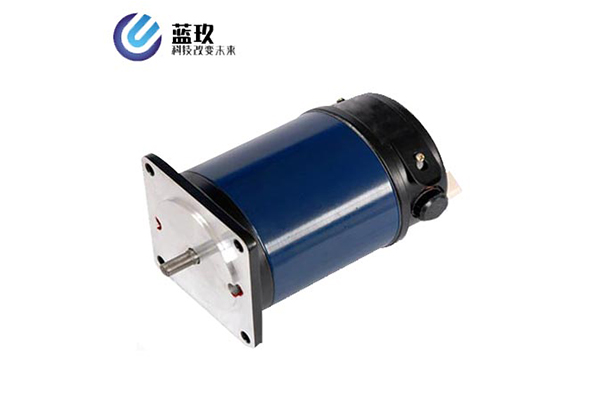
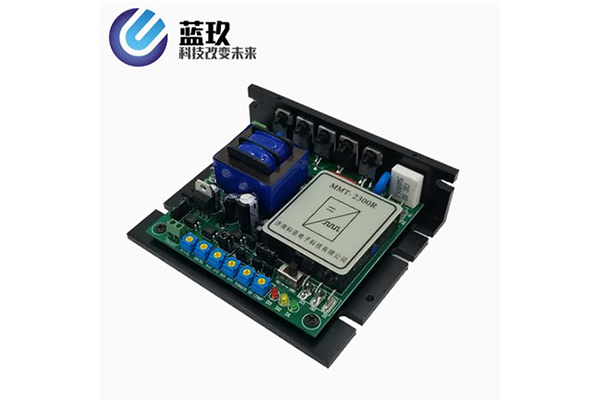
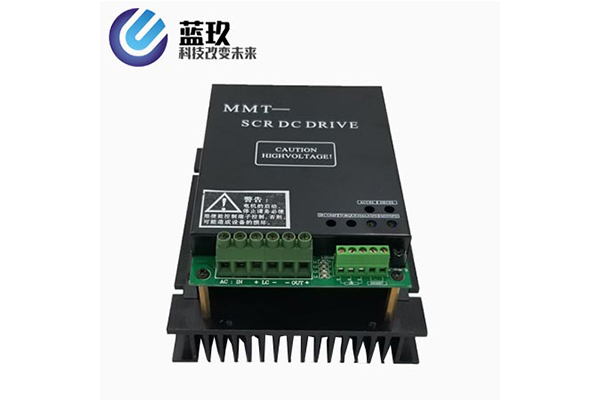
在转子S极端也是同样道理,当绕组齿对齿时,其旁边一相磁极错位1.8°。AGV机器人直流无刷伺服电机必须有驱动器和控制器才能正常工作。驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电,控制电机转动。步进电机 42BYG250C的驱动器为SH20403。为10V~40V直流供电, A+、A-、B+、B-端 子要连接步进电机的四条引线,DC+、DC-端子接驱动器工作直流电源,输入接口电路包括公共端、脉冲信号输入端,内部、方向信号输入端脱机信号输入端。

下面就由直流无刷伺服电机专用为您讲解一下步进电机的缺点。1、步进电机在正常情况下运转不能达到比较高的转速。2、步进电机在体积重量方面没有什么优势,能源利用率比较低。3、步进电机如果超过负载时的话,就会破坏同步情况,导致在高速工作的时候产生振动以及噪声。4、步进电机如果控制不好的话,就会产生共振的情况。

AGV机器人直流无刷伺服电机是一种应用广泛的工业产品,同时具有工业品的价格,被广泛应用于工业场合。行星减速机主要传动结构:太阳轮、行星轮和齿轮环组成。行星减速机具有体积小、扭矩大、惯性矩小、背隙小、精度高、效率高、噪音低、寿命长、免维护、可随意安装等优点。适用于各种牌号的伺服电机和步进电机。AGV机器人直流无刷伺服电机的作用是实现伺服,即精准定位。行星减速机的输出速度和转矩可根据需要进行调整。由于电机的转速输出通常是恒定的(只有几个齿轮),实际需要的转速相差很大,所以行星减速机需要调整到所需的转速范围。当伺服电机负载较大时,盲目增大伺服电机功率以满足要求的转矩会造成成本浪费。因此,在要求的速度范围内选择适合减速比的伺服减速机是合理的。伺服减速机本身的作用是减速和增加输出扭矩。
AGV机器人直流无刷伺服电机是常用的动力源-电机,一般四极电机转速在1400转每分钟(前提是50HZ,频率会影响电机转速,这点在变频器上应用),但是你的工作机并不需要这么快,如果使用变频器的话,有很多限制,无论频率变低还是变高,都会导致电压变化,从而使电机输出功率变低,而且不能长期使用,电机容易烧坏;其次,从公式P=(V*M)/(9550*η )可知,精密行星减速器在功率和效率固定的情况下,速度和力矩是成反比的,降低转速的同时,将获得更大的力矩,也就是说,你可以用更小的原动机带动更大的工作机。AGV机器人直流无刷伺服电机还能满足你对换向的需要,很多机器设备由于安装空间,设计原理等原因,安装形式特别,这时候一款合适的减速机可以满足你的所有需求。
怎样解决AGV机器人直流无刷伺服电机早期点蚀的状况。点蚀肯定与润滑油有关系,同时它还要与减速机的材料有密切联系。平时的使用过程一会有一定处理规范。还有一点就是由于齿轮接触不好造成局部超负荷而产生的,齿轮的局部超负荷使实际接触应力大大超过齿轮材料的许用接触应力,有的齿轮达不到全齿长接触或仅在齿的一端接触,甚至对角接触。

1、熟悉AGV机器人直流无刷伺服电机结构特点和检修技术要求;2、选择电机解体的工作地点,清理现场环境;3、为了进一步了解直流无刷电机运行中的缺陷,有条件时可在拆卸前做一次检查试验;4、直流无刷电机在拆卸前,要用压缩空气吹净电机表面灰尘,并将表面污垢擦拭干净;5、准备好解体所需工具(包括专用工具)和设备;6、切断电源,拆除电机外部接线,做好记录。在电机的使用和维护过程中,有疑虑可以及时联络山社步进电机的工程师提供技术支持。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
