13156105039
工业自动化产品配套服务商

13156105039
工业自动化产品配套服务商

电 话:13156105039
邮 箱:Kevin@lanjiukeji.com
网 址:www.lanjiukeji.com
地 址:中国山东省济南市长清区玉清路2222号

轮毂电机厂家有异常噪音的原因及处理:1、当定子与转子相擦时,会产生刺耳的“嚓嚓”碰擦声,这多是轴承有故障引起的。应检查轴承,损坏者更新。如果轴承未坏,而发现轴承走内圈或外圈,可镶套或更换轴承与端盖。2、电动机缺相运行,吼声特别大。可断电再合闸,看是否能再正常起动,如果不能起动,则可能有一相熔丝断路。开关及接触器触头一相未接通也会发生缺相运行。3、轴承严重缺油时,从轴承室能听到“咝咝”声。应清洗轴承,加新油。4、风叶碰壳或有杂物,发出撞击声。应校正风叶,清除风叶周围的杂物。
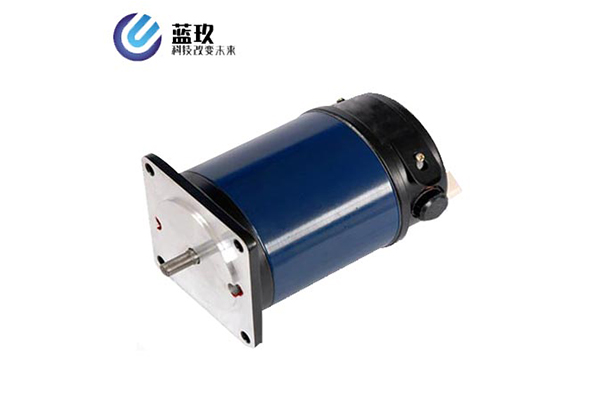
轮毂电机厂家发热虽然一般不会影响电机的寿命,对大多数客户来说没必要理会。但是,严重的发热会带一些负面影响。如电机内部各部分热膨胀系数不同导致结构应力的变化和内部气隙的微小变化,会影响电机的动态响应,高速会容易失步。又如有些场合不允许电机的过度发热,如器械和的测试设备等。因此对电机的发热应当进行必要的控制。

轮毂电机厂家可以将电能转换成机械能也可以将机械能转换成电能,并且跟着它的不断完善运用规划也在不断的扩展,本文就为我们介绍一下它的电枢反应,一起来了解下吧。在了解电枢反应之前应该先了解它的励磁绕组,励磁绕组几个通直流电的线圈(并励串励或复励)是固定不动的部分,而电枢绕组是装有换向器的绕组是翻滚的部分。

AGV机器人轮毂电机将脉冲信号转换为角位移或线性位移。首先,过载是好的。速度不受负载大小的影响。与普通电动机不同,当负载增加时,速度将下降。步进电机对速度和位置有严格的要求。第二是方便控制。 步进电机以“步长”为单位旋转,数字功能更加明显。第三,整机结构简单。传统的机械速度和位置控制结构复杂且难以调整。使用步进电机后,整机结构简单紧凑。 转速表电机将速度转换为电压,并将其作为反馈信号传递给输入。

在转子S极端也是同样道理,当绕组齿对齿时,其旁边一相磁极错位1.8°。AGV机器人轮毂电机必须有驱动器和控制器才能正常工作。驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电,控制电机转动。步进电机 42BYG250C的驱动器为SH20403。为10V~40V直流供电, A+、A-、B+、B-端 子要连接步进电机的四条引线,DC+、DC-端子接驱动器工作直流电源,输入接口电路包括公共端、脉冲信号输入端,内部、方向信号输入端脱机信号输入端。
![]()
13156105039
![]()

济南蓝玖电子科技有限公司
电话: 13156105039
网址:www.lanjiukeji.com
地址:中国山东省济南市长清区玉清路2222号
Copyright © 济南蓝玖电子科技有限公司 备案号:鲁ICP备20008802号
